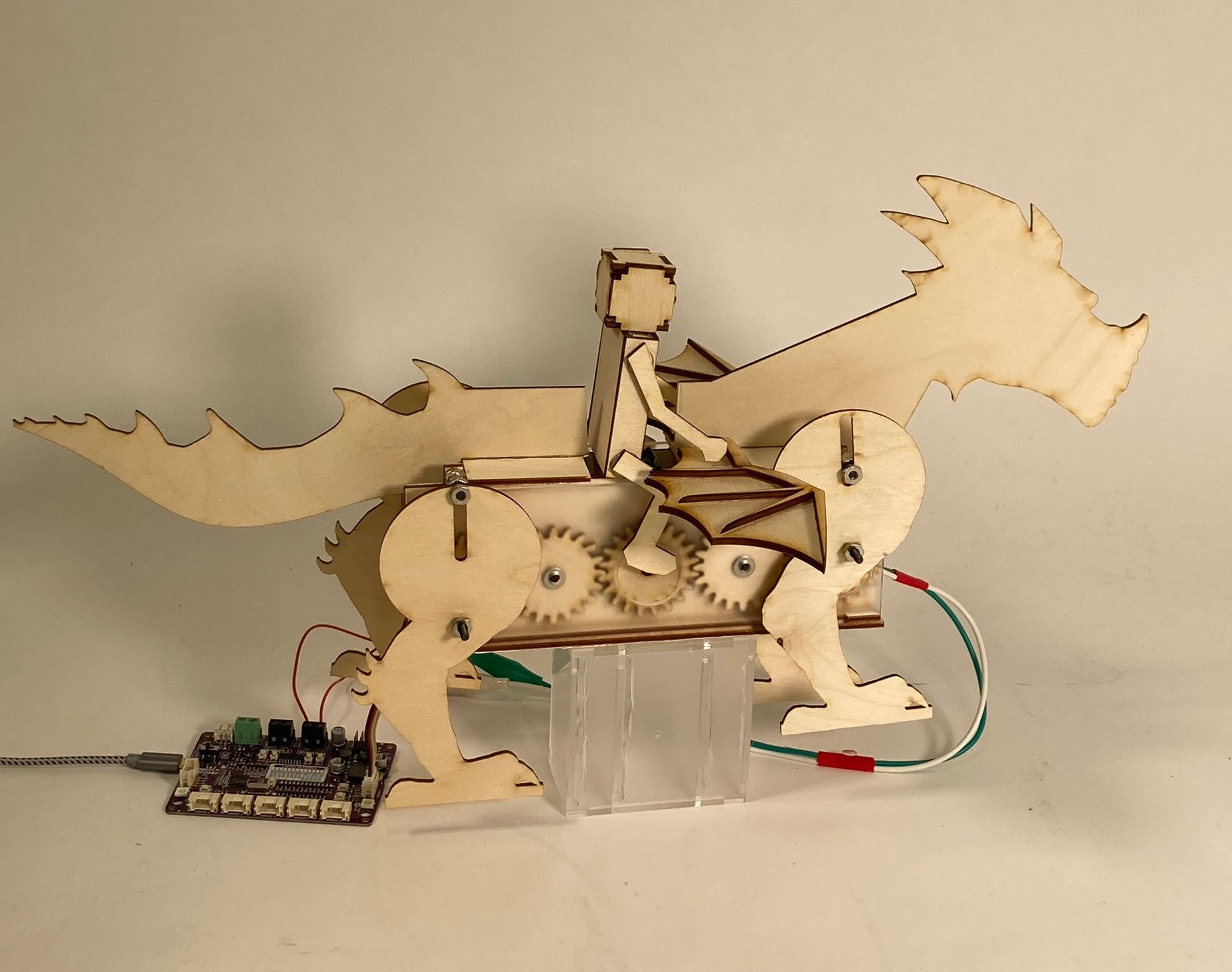
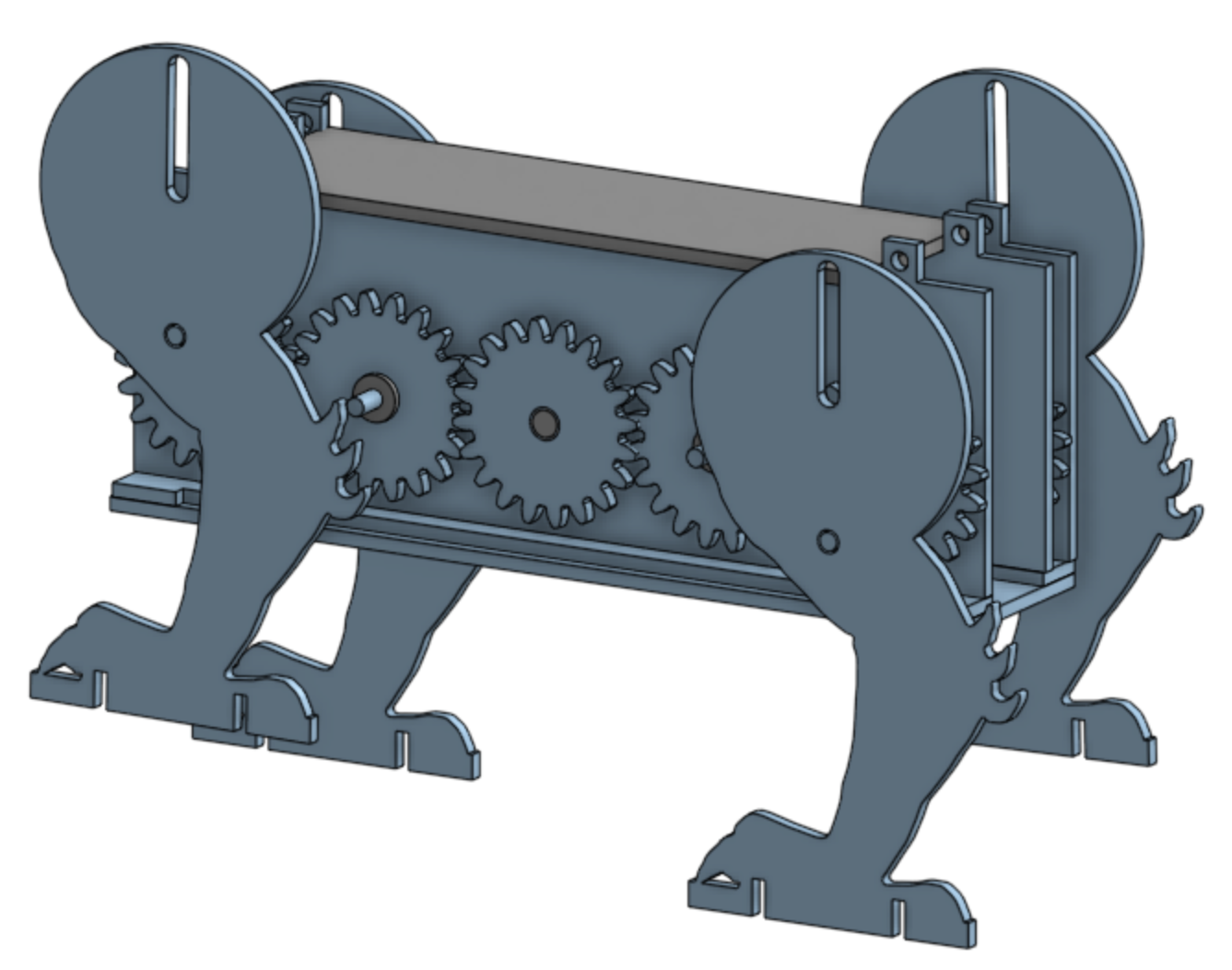
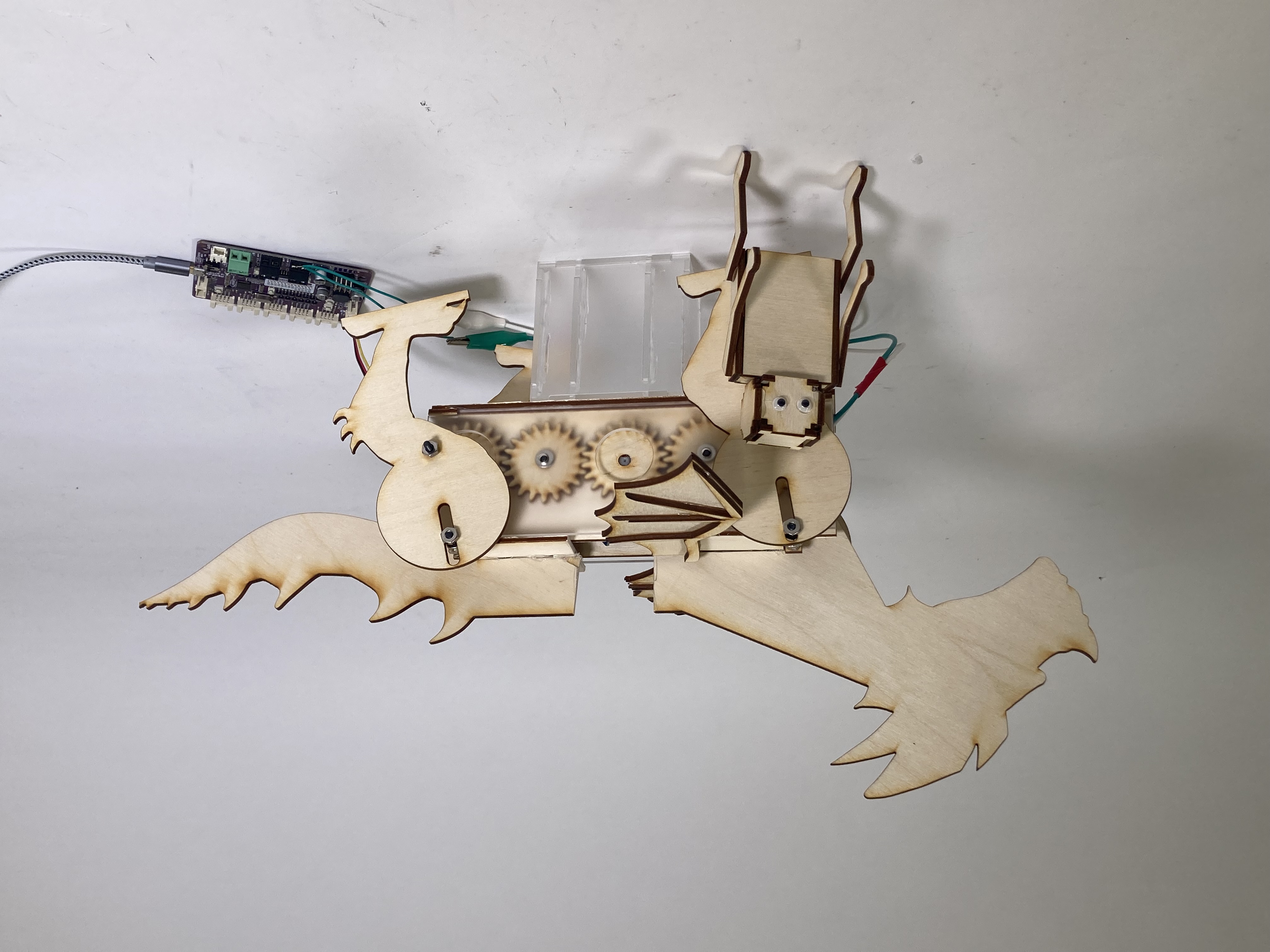
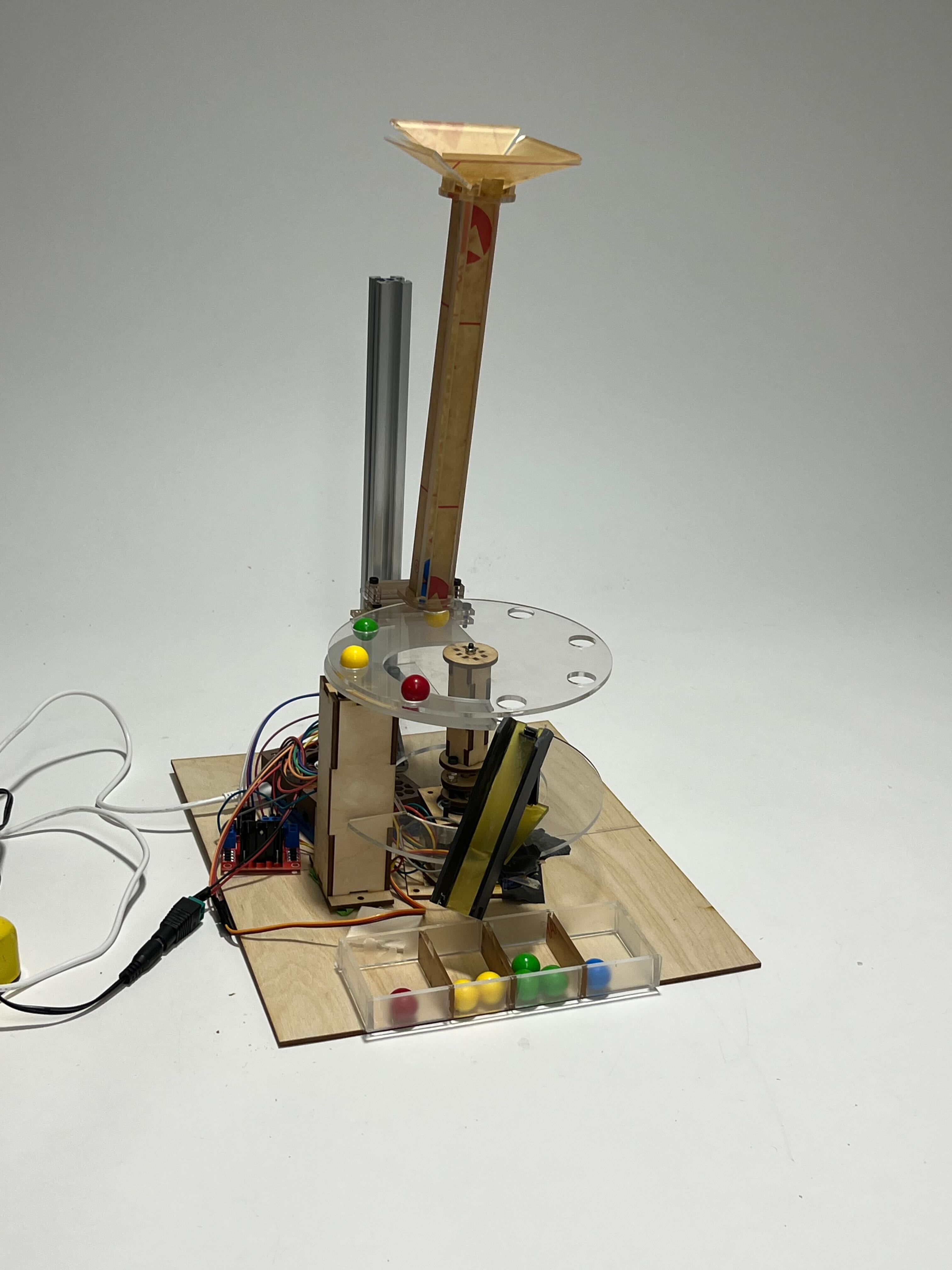
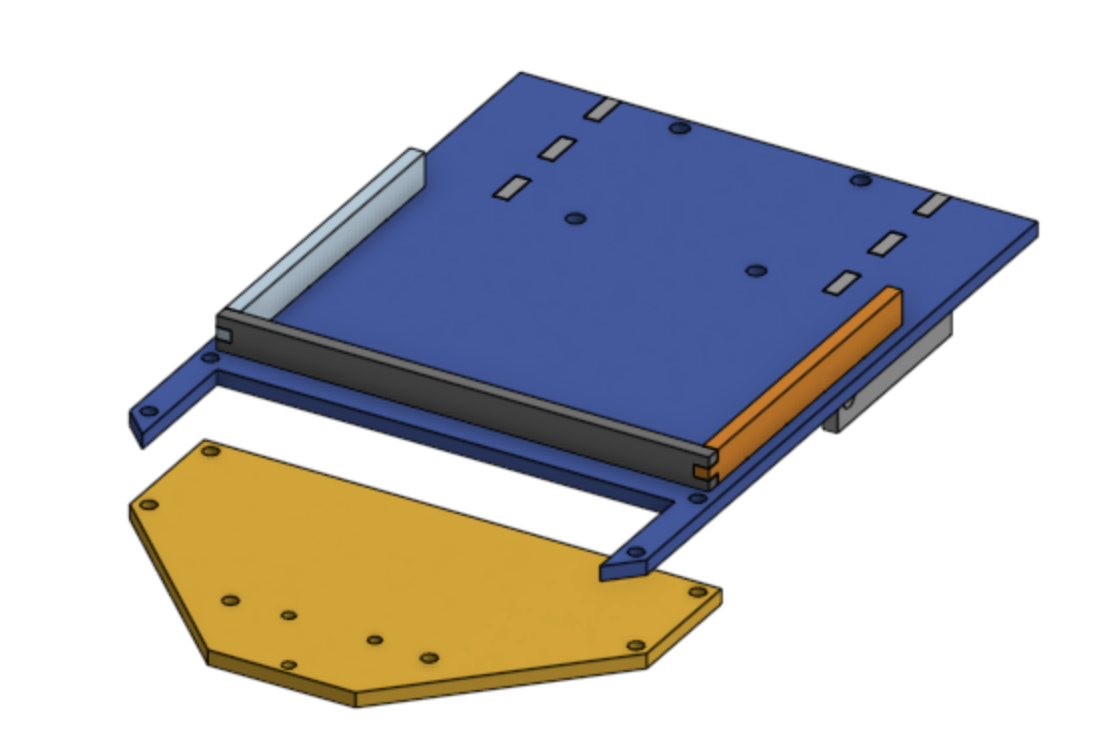
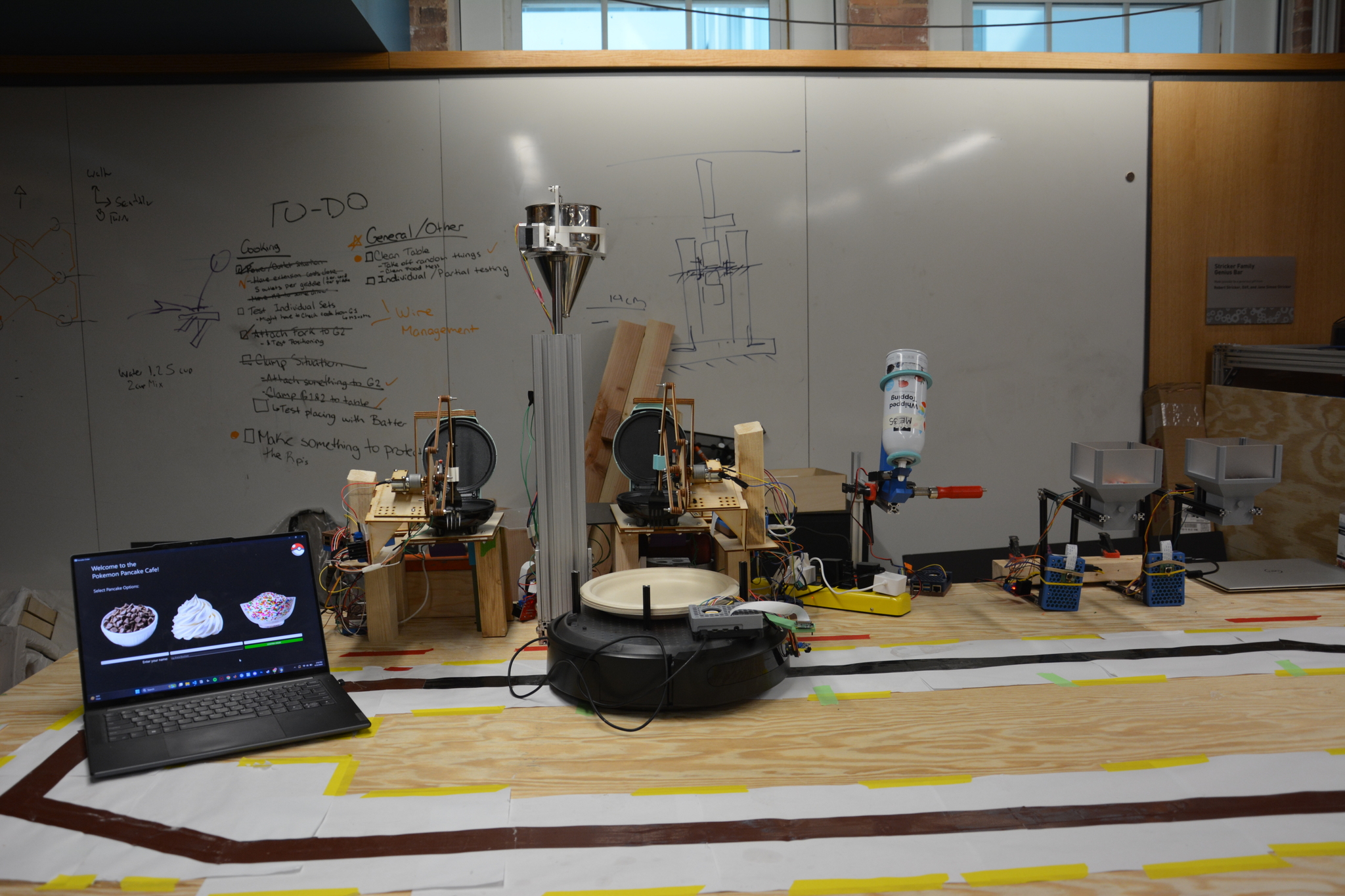
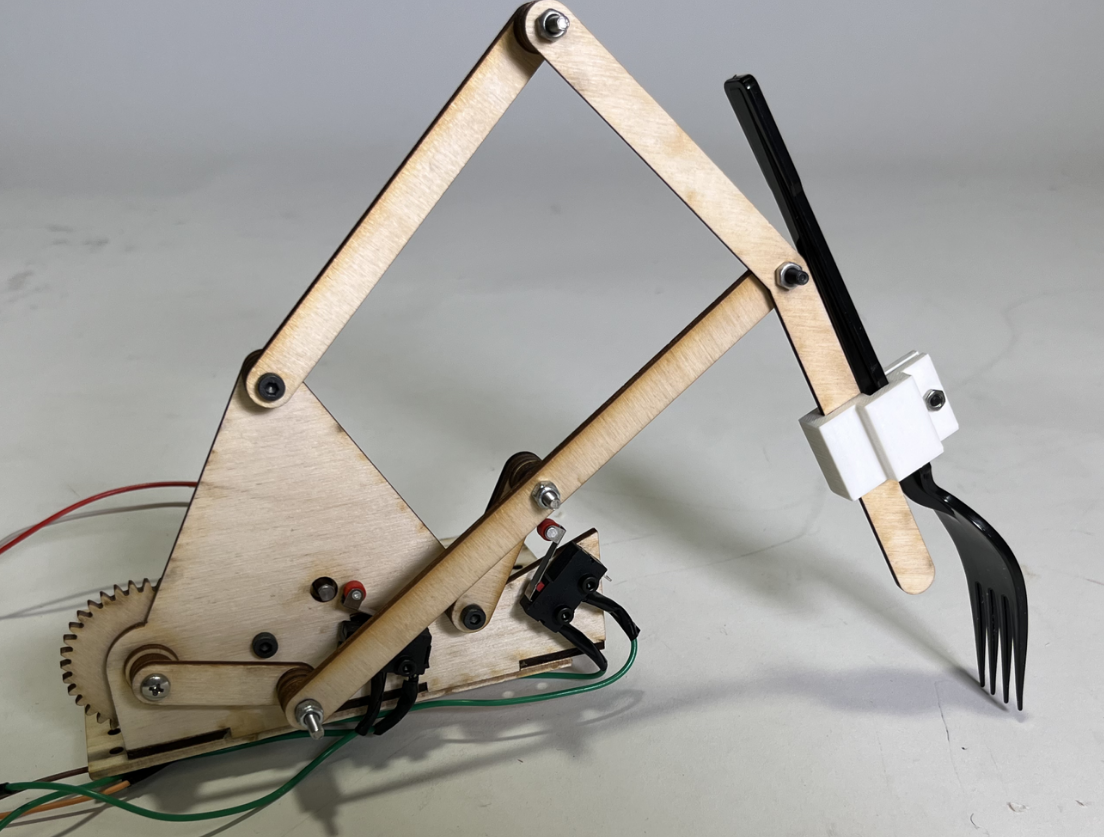
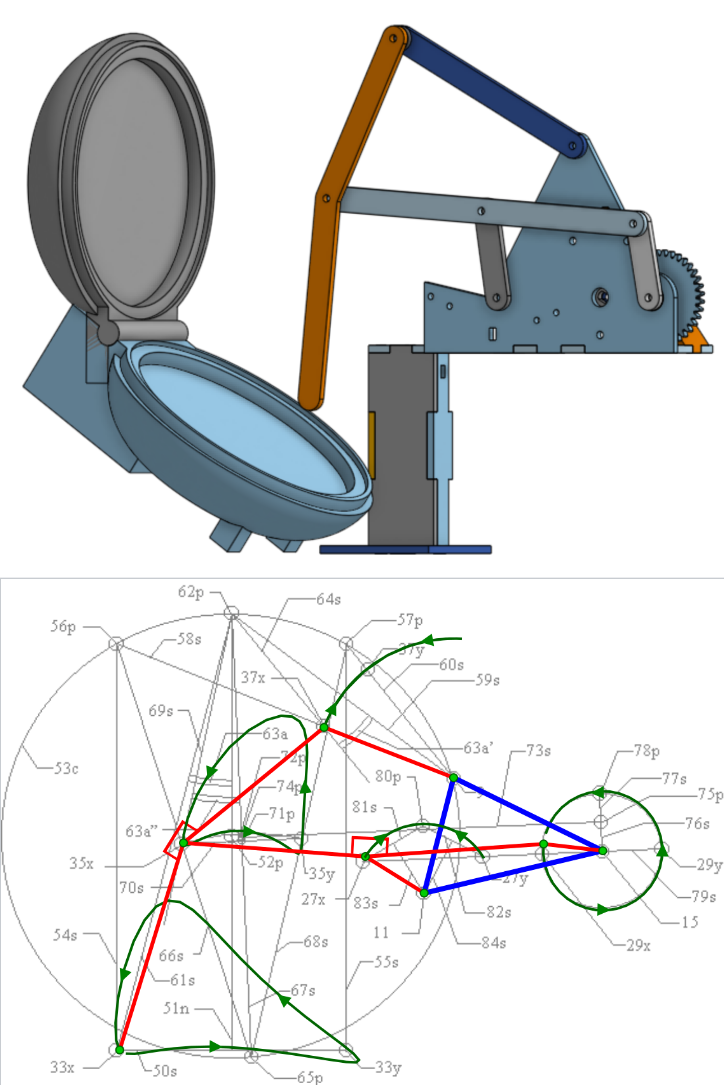
Pancake Making Robot
CAD | Linkages | Python
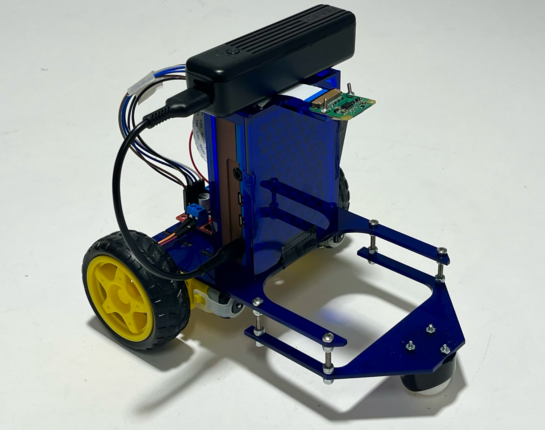
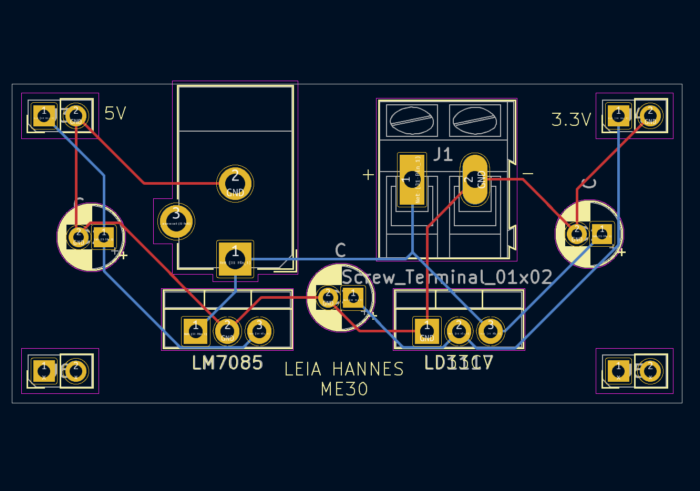
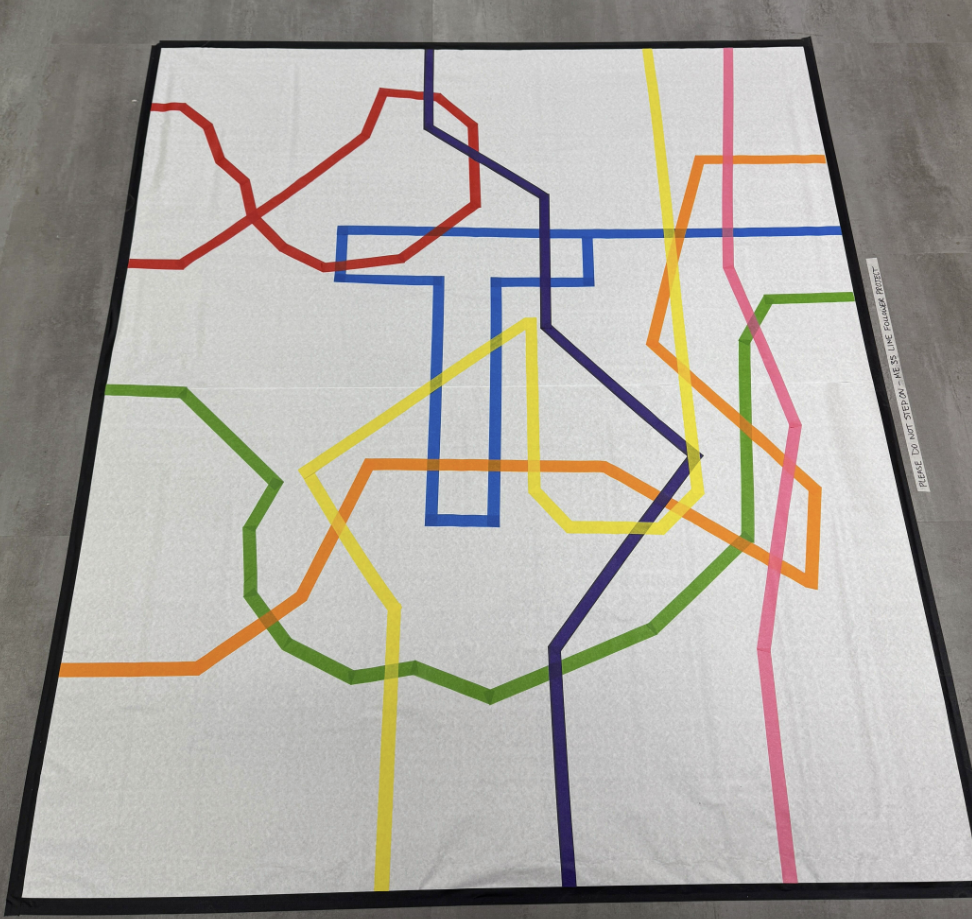
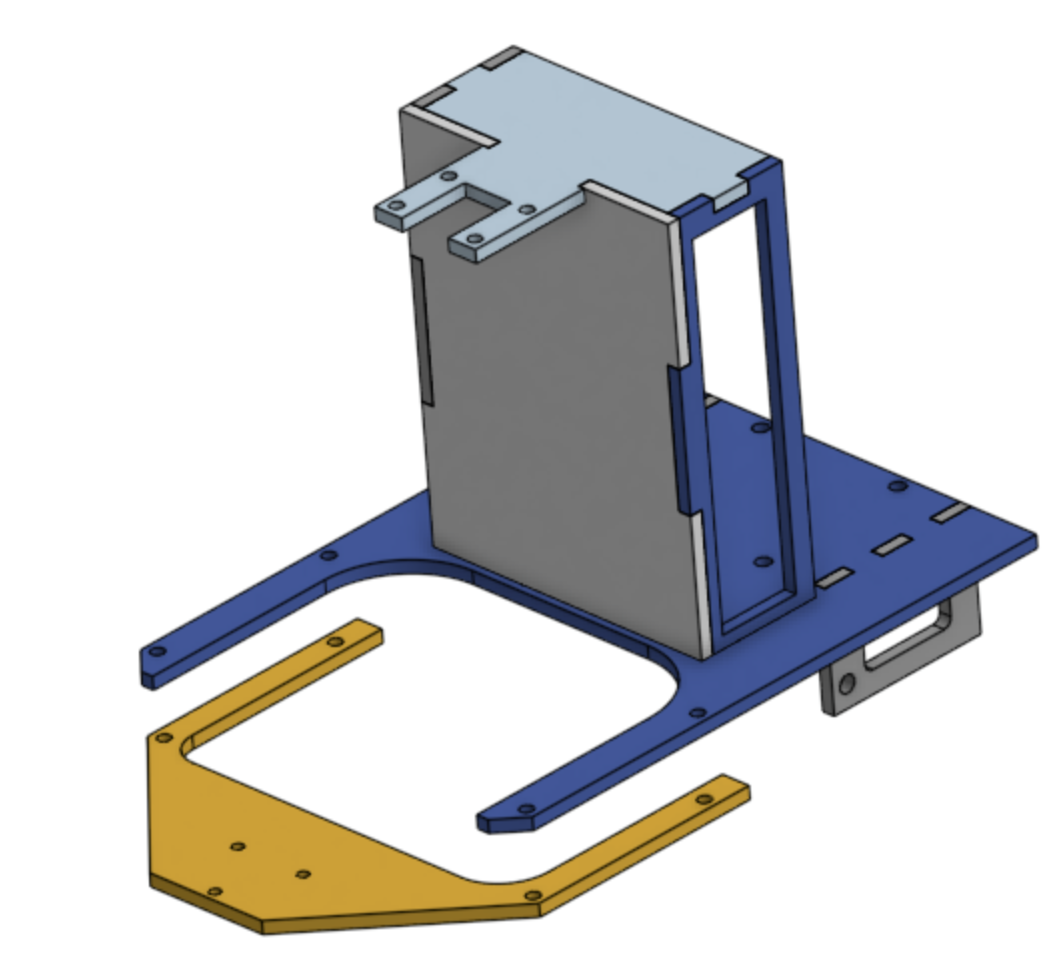
Camera Line Follower
Python | Image Processing

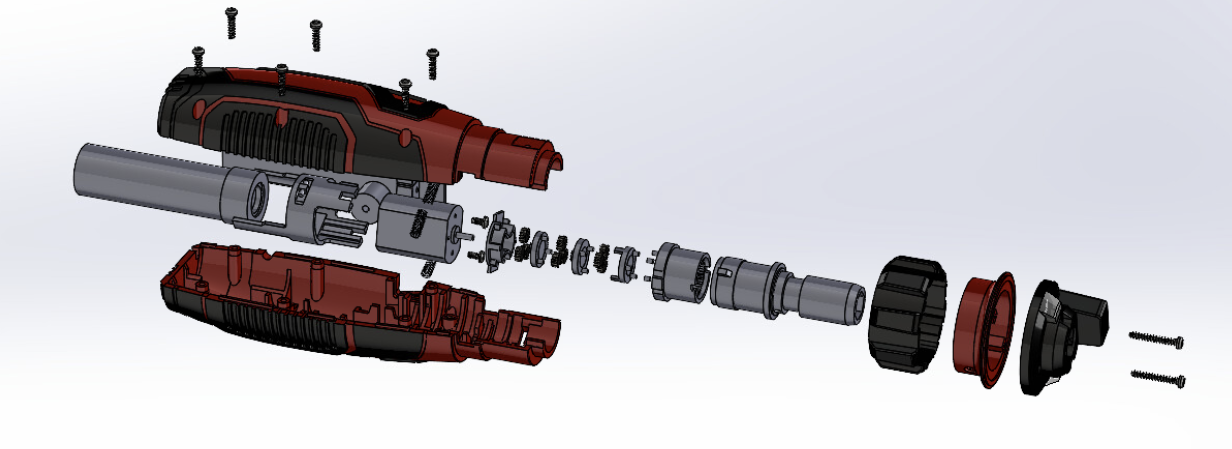
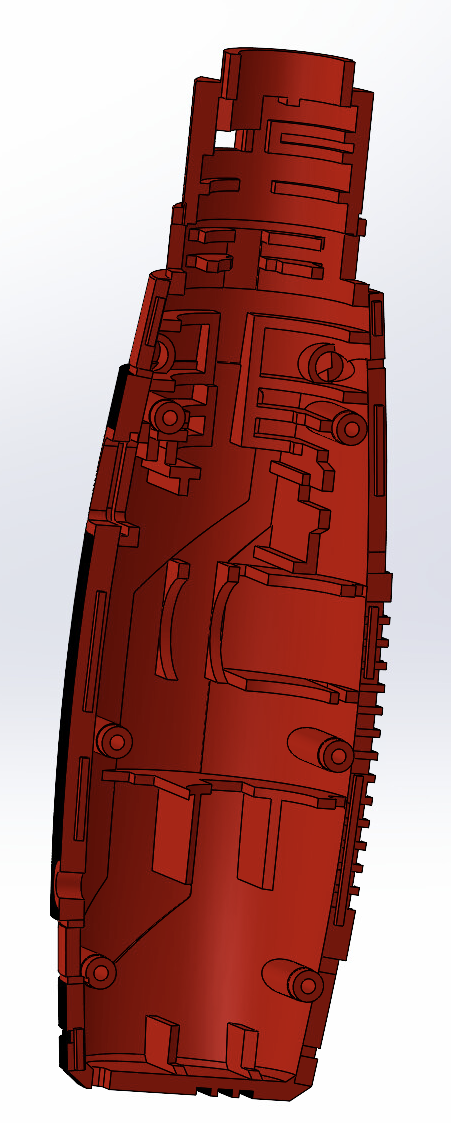
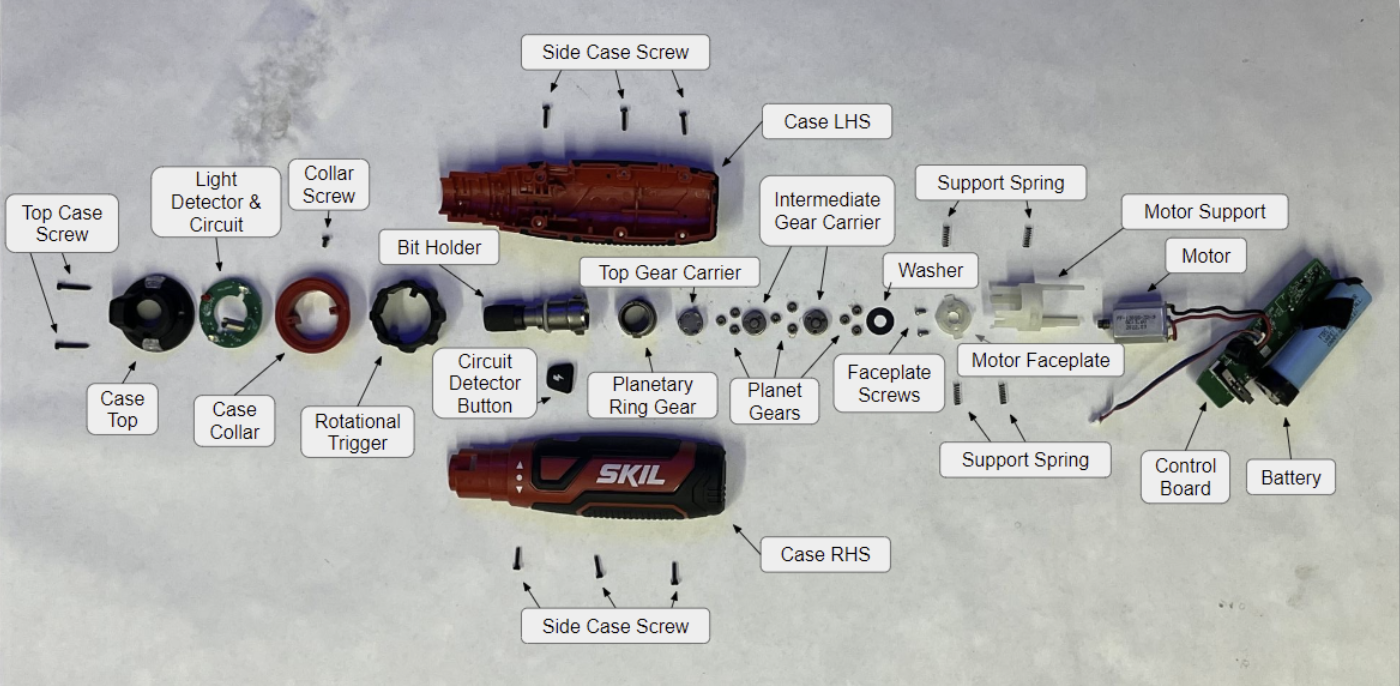
Product Teardown
Solidworks | Analysis | Teamwork